Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPAFraunhofer IPA Bin-Picking dataset
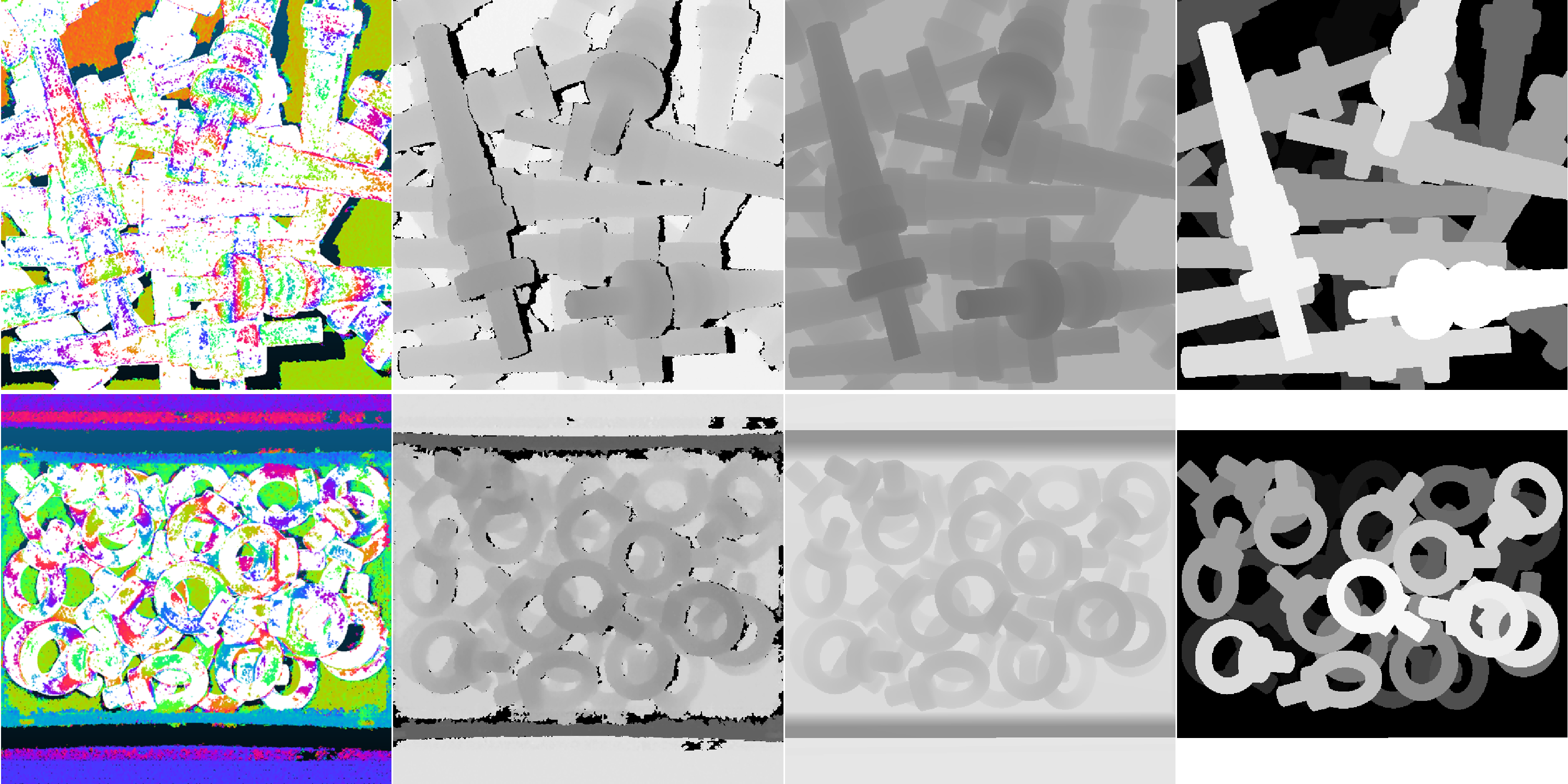
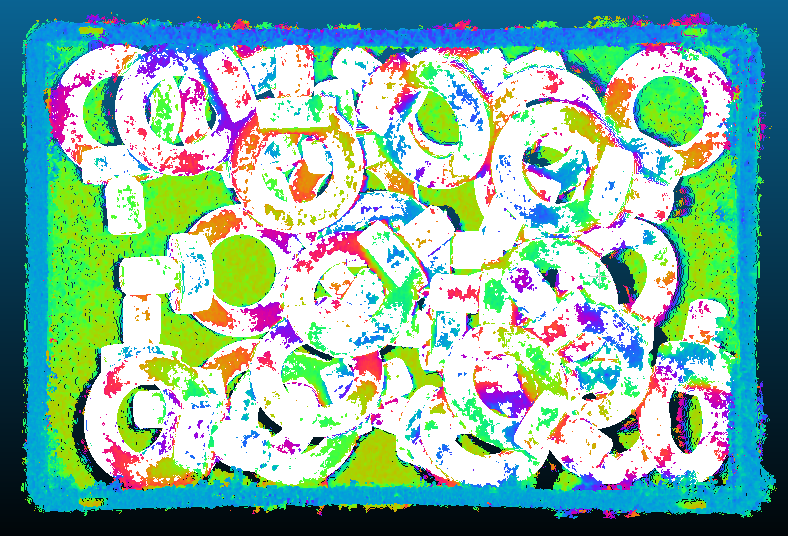
The »Fraunhofer IPA Bin-Picking dataset« is a large-scale dataset comprising both simulated and real-world scenes for various objects (potentially having symmetries) and is fully annotated with 6D poses. A pyhsics simulation is used to create scenes of many parts in bulk by dropping objects in a random position and orientation above a bin. Additionally, this dataset extends the Siléane dataset by providing more samples. This allows to e.g. train deep neural networks and benchmark the performance on the public Siléane dataset. By contributing this dataset, we aim for advancing the development of novel methods for Object Pose Estimation with advanced machine learning techniques like deep learning.
The (training) dataset, a description, and scripts to facilitate the usage of the dataset will be available for download on this website three months before the competition. This enables the participants to develop their algorithms, setup and test their routines, and test their methods on the datasets to allow a smooth execution on the competition day. The (test) datasets used for evaluation will be provided on the first competition day.
In order to download the dataset, please register here.
A paper (IROS 2019) giving more information on the dataset is available here.